



Towards the end of last year, I had the opportunity to visit a construction site that was using technology from a company called Dusty Robotics. As the name suggests, the company makes robots, not for tasks that we typically associate with robots such as manufacturing prefabricated components or even for automating tasks for onsite construction such as rebar tying, but rather, for marking up the precise layout for multiple trades on the floor of a construction site.
This might seem a relatively low-tech task for a robot, given all the high-tech stuff we have come to expect from technologies like robotics (see Robotics - Wikipedia), but a visit to any construction site will highlight how much of manual labor and sheer grunt work still goes into the building of even the most basic structure. Before you can put anything in place, you have to determine exactly which element goes where, to accurately translate the building plan that has been developed on paper to the actual floor where it will be built (Figure 1). This can take a construction crew days or even weeks to do, depending upon the complexity of the project.
If only there was a way to just “blow up” the building plan from the paper (or computer) to fit on the floor!
That is precisely what Dusty Robotics does. It manufacturers robots, called FieldPrinters, that mark up the building layout on a construction slab, accurately translating the computer-drawn floor plan to the site, so that all the building elements can be precisely located without the tedious and backbreaking work site personnel typically have to do to get started.
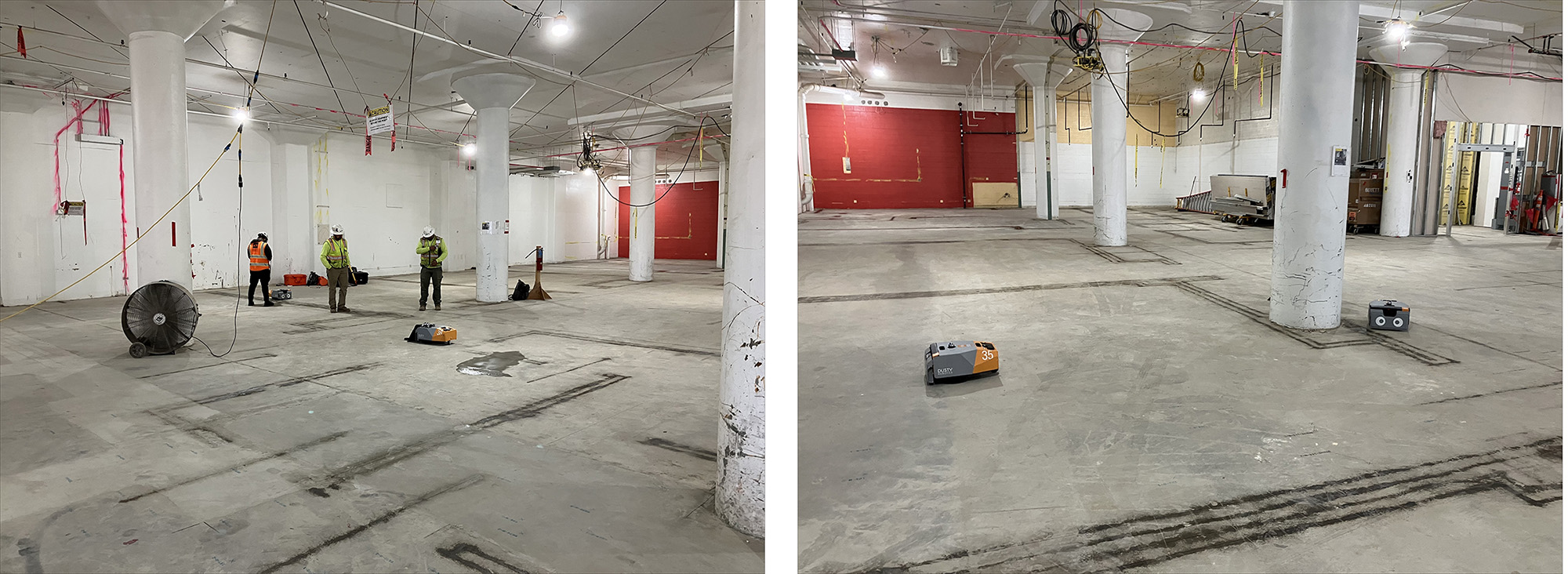
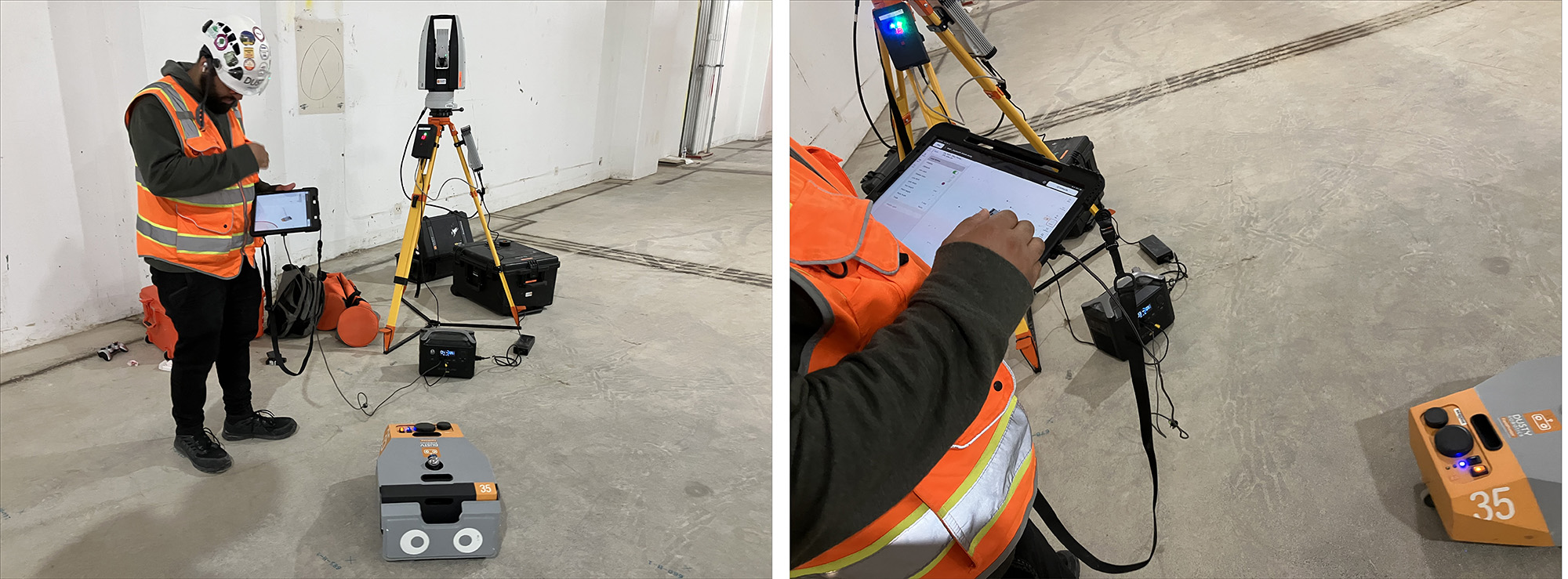
The site that I visited to see Dusty Robotics in action was a large healthcare project in Berkeley by Truebeck Construction, a leading West Coast commercial general contractor that specializes in ground-up construction and tenant improvements. The layout process on the main floor was just getting started, and it was a multi-trade layout that included framing, plumbing, electric, HVAC, etc. While a site can have up to twenty Dusty robots operating simultaneously for multiple zones and trades for a large and complex project, there were two robots being used simultaneously for the layout marking on the day I visited (Figure 2).
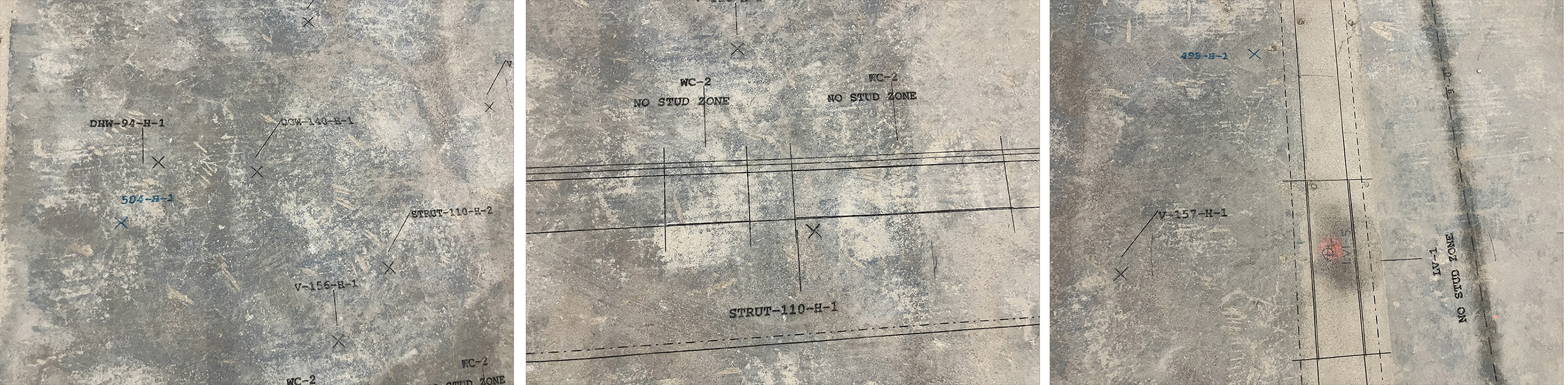
Of the two Dusty FieldPrinters that were being deployed, one was marking up the plumbing layout on the floor, while the second was marking up the electrical layout. The two different kinds of markings were distinguished by color, as shown in Figure 3.

The actual printing is done by means of two ink cartridges that are located in the front of the robot, as shown in Figure 4. These cartridges can be easily refilled or replaced once they are close to running out, similar to how ink and toner cartridges are replaced in a paper printer.

Seeing the robots in action on the site was very similar to watching a gamer playing a video game with a controller — the constructor worker guides the robot using a similar remote control (Figure 5).
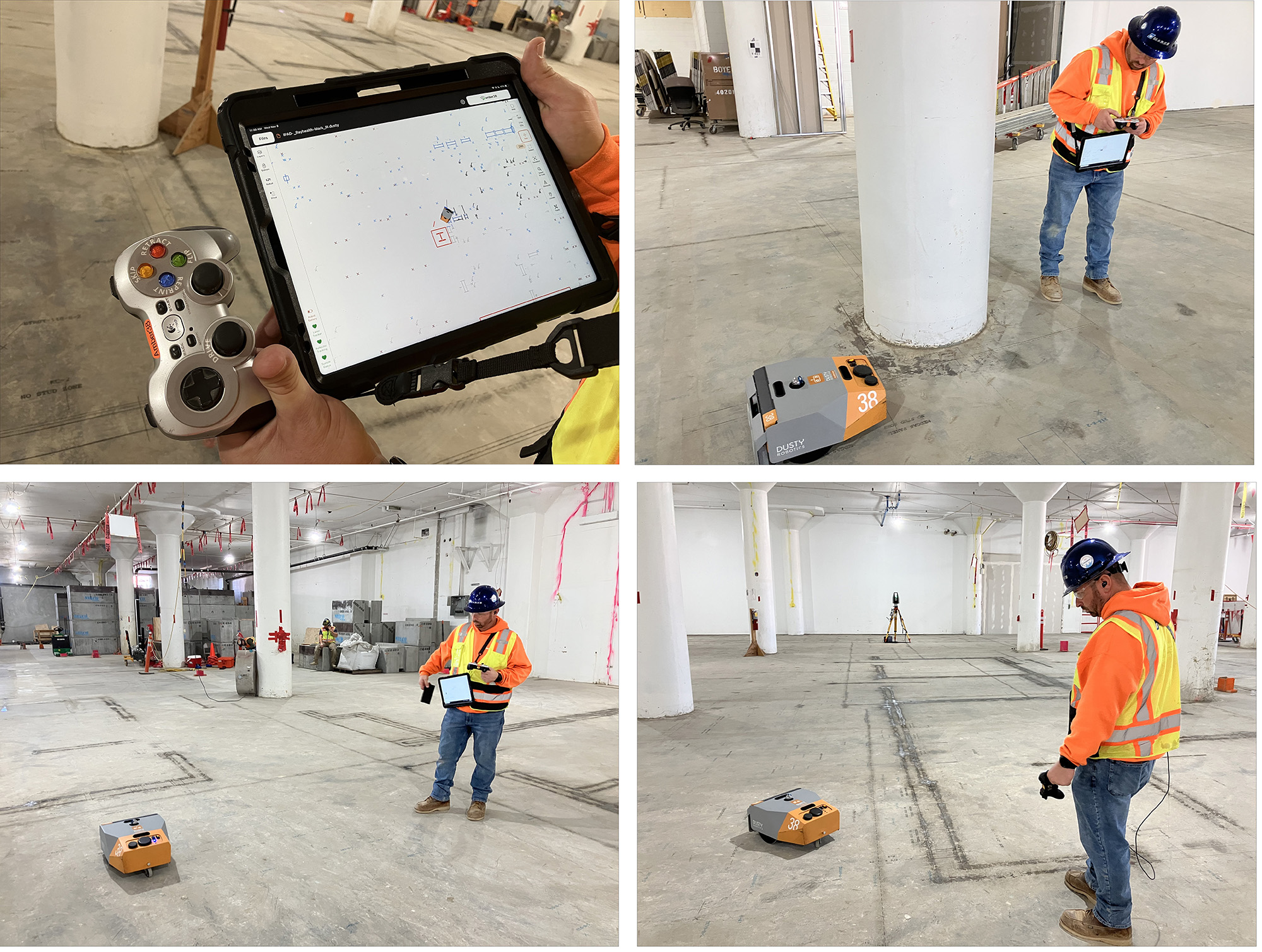
As shown above, the controller is used in conjunction with an iPad/Android tablet and a laser tracker (that looks like a total station). The laser tracker keeps tracks of the current location of the robot (Figure 6), while the movement of the robot is driven by software from Dusty Robotics that is on the tablet (Figure 7). The software can input a CAD drawing or a BIM model and extract the floor plan data from it, which is then used to determine the location of the different layout marks that need to be printed. The software is then paired with a robot to chart out its path and print the marks at the designated locations. Once a mark has been printed, it is indicated as such in the software, so the construction worker monitoring and controlling the robot can see exactly which marks have been printed and which are remaining.

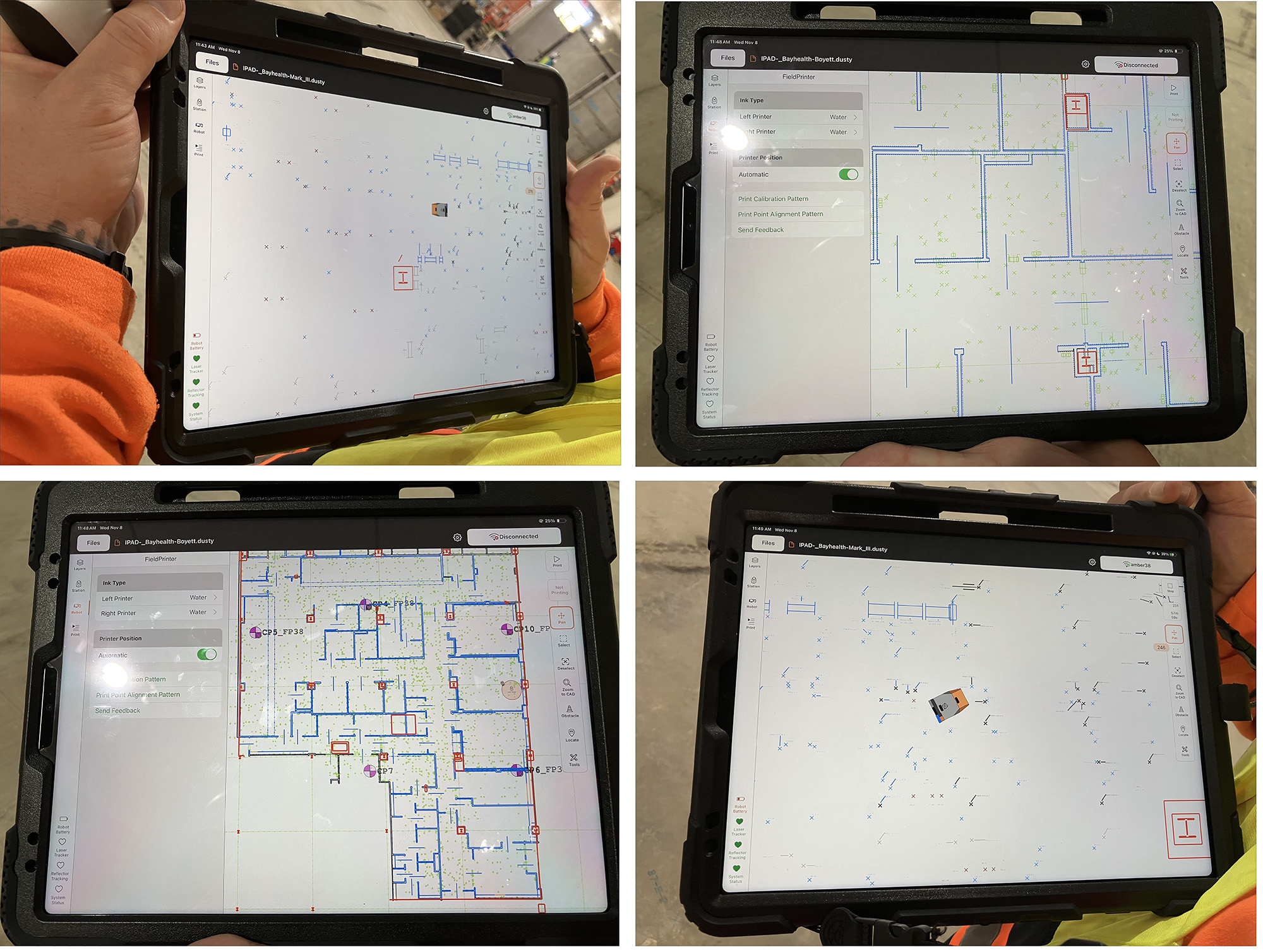
It should be emphasized that the construction workers managing the robots are in complete control. They can indicate in the software on the tablet where the robot should go next, pause its movement, turn it off, and so on (Figure 8). Also, the robots are designed to automatically detect and avoid collisions. They are also able to ride over the normal amount of debris at the construction site – the floor does not need to be super-clean in order for them to work.
While marking the layout of building elements on a construction site may not be the most glamorous of tasks for a relatively new robotics company in AEC, there is no doubt that its value proposition is very compelling. Given that we are using technology in so many advanced ways across architecture and engineering — as well as across so much of construction including 3D printing, prefabrication, and the use of robots for reality capture — there is a surprising lack of solutions to address the layout marking task, which is still being mostly done manually.
The only other technology solution I am aware of that does robotic layout printing is HP SitePrint. Thus, Dusty Robotics is filling a definite need in the construction sector for fast and accurate site layouts. For a retrofit of the kind I attended, it would have taken the construction personnel on site over a month to do the layout. With Dusty’s robots, it can be done in a few days and is guaranteed to be precise, as it is coming straight from a CAD drawing.
And ultimately, anything that can reduce the amount of backbreaking work we need to do is welcome!
Lachmi Khemlani is founder and editor of AECbytes. She has a Ph.D. in Architecture from UC Berkeley, specializing in intelligent building modeling, and consults and writes on AEC technology.
Have comments or feedback on this article? Visit its AECbytes blog posting to share them with other readers or see what others have to say.
AECbytes content should not be reproduced on any other website, blog, print publication, or newsletter without permission.
This Viewpoint article by Bhushan Avsatthi, Director of BIM at HitechDigital, prognosticates the top BIM trends that are set to transform the legacy brick-and-mortar AEC industry.

NGP, a full-service architecture, urban planning, and interior design studio located in Los Angeles, whose work includes projects in the multifamily, mixed-use, hospitality, affordable housing, and retail sectors, shares its perspective on AEC technology.
This article provides an overview of HoloBuilder, which uses 360° photos to track construction progress guided by a mobile app on the jobsite and provides a cloud platform for hosting, organizing, and sharing the captured images.
This article by Andrew Serafimin, head of the Digital Measurements department at SIGNAX, discusses the approach to conducting geodetic surveys on the premises of operating industrial enterprises using modern instruments and technologies.